Camera Placement Optimization for a Novel Modular Robot Tracking System
October 29, 2023· ,,,,,,·
0 min read
,,,,,,·
0 min read
Jan Baumgärtner
Bernd Bertschinger
Kathrin Hoffmann
Alexander Puchta
Oliver Sawodny
Stephan Reichelt
Jürgen Fleischer
Abstract
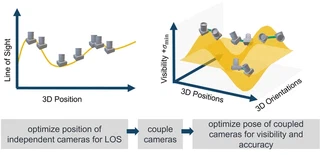
The surge in industrial robots performing high-accuracy tasks like milling and spray painting necessitates effective error compensation methods. External tracker hardware has been traditionally employed, but its cost and limited scalability hinder its effectiveness as accuracy requirements change. This paper proposes a novel optical tracking system using holographic multipoint detection comprised of multiple independently placed cameras. The placement is determined using a novel optimization method that takes into account an error model of the system, the dynamic movement of the robot, and the resulting occlusion of the markers. This optimization algorithm is evaluated on a simulated two-arm robot scenario showing its capability to decrease the triangulation error.
Type
Publication
In 2023 IEEE SENSORS, pp. 1-4

Authors
Head of Research Industrial Robotics & Scientific Coordinator of CRC 1574
Hi I am Jan! I am a researcher working at the intersection of robotics and manufacturing. My work focuses on intelligent robotic manufacturing systems, where reconfigurable hardware and autonomous reasoning systems meet to enable autonomous and circular production. I also coordinate the Industrial Robotics research at wbk Institute of Production Science, KIT, as well as the Collaborative Research Centre 1574 Circular Factory for the Perpetual Innovative Product.