A Control Architecture for Robust and Resilient Circular Factories under Uncertain Conditions
January 1, 2025· ,,,,,,,,,,,·
0 min read
,,,,,,,,,,,·
0 min read
F. Bail
Jan Baumgärtner
F. Erlenbusch
A. Ernst
M. Poyer
E. Blum
Y. Shi
R. Wolf
R. Rayyes
J. Pfrommer
N. Stricker
Jürgen Fleischer
G. Lanza
Abstract
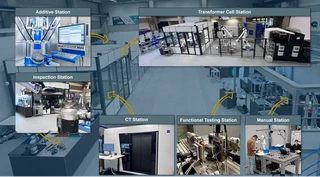
Resource depletion and environmental harm highlight the need for more sustainable manufacturing methods like circular manufacturing. Circular manufacturing methods such as remanufacturing introduce uncertainties that arise due to core variability, leading to the frequent occurrence of disruptions. Therefore, an automated control structure is needed that can maintain stable high performance in the face of such uncertainties and disruptions. We present a novel architecture that is designed to enhance the resilience and robustness of automated circular factories. To achieve this, we propose a two-level approach resembling a cascaded control system. The outer layer, the production system level, is designed to ensure resilience by maintaining overall factory operations during larger disruptions. In contrast, the inner layer, the station level, focuses on robustness, managing minor disturbances and failures at individual stations. We address the allocation of responsibilities between these two levels and the modeling of commands. Our approach considers a novel integration of production stations, inspection stations and an intelligent intralogistics system to allow for a flexible and adaptable automated production system. Our approach presents the first control architecture specifically designed to address the unique uncertainties and disruptions arising from core variability in circular manufacturing.
Type
Publication
Procedia CIRP, 134, 1083-1088

Authors
Head of Research Industrial Robotics & Scientific Coordinator of CRC 1574
Hi I am Jan! I am a researcher working at the intersection of robotics and manufacturing. My work focuses on intelligent robotic manufacturing systems, where reconfigurable hardware and autonomous reasoning systems meet to enable autonomous and circular production. I also coordinate the Industrial Robotics research at wbk Institute of Production Science, KIT, as well as the Collaborative Research Centre 1574 Circular Factory for the Perpetual Innovative Product.