Increasing Robot Precision by Stroke Division
August 22, 2023· ,,,,,,·
0 min read
,,,,,,·
0 min read
Jan Baumgärtner
Alexander Puchta
Bernd Bertschinger
Gajanan Kanagalingam
Oliver Sawodny
Stephan Reichelt
Jürgen Fleischer
Abstract
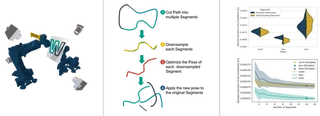
Robots are increasingly performing complex tasks in industrial settings, such as welding, painting, and cutting, but their lower stiffness and repeatability, especially in the cheaper end of the market, limit performance. While previous research aimed to improve robot repeatability by optimizing the pose of the workpiece, these approaches were not feasible for large and complex paths. This paper proposes a novel approach of incorporating a second robot to adjust the workpiece’s position during the manufacturing process, thereby forming a single high-precision robotic system. This paper aims to investigate the feasibility of this approach. For this purpose, it presents a path planner to leverage the resulting additional degrees of freedom to achieve greater repeatability. The effectiveness of this planner is then compared to previous approaches.
Type
Publication
In 2023 27th International Conference on Methods and Models in Automation and Robotics (MMAR), pp. 205-210

Authors
Head of Research Industrial Robotics & Scientific Coordinator of CRC 1574
Hi I am Jan! I am a researcher working at the intersection of robotics and manufacturing. My work focuses on intelligent robotic manufacturing systems, where reconfigurable hardware and autonomous reasoning systems meet to enable autonomous and circular production. I also coordinate the Industrial Robotics research at wbk Institute of Production Science, KIT, as well as the Collaborative Research Centre 1574 Circular Factory for the Perpetual Innovative Product.