Learning Optimal Design Manifolds to Design More Practical Robotic Systems
May 19, 2025· ,,·
0 min read
,,·
0 min read
Jan Baumgärtner
Alexander Puchta
Jürgen Fleischer
Abstract
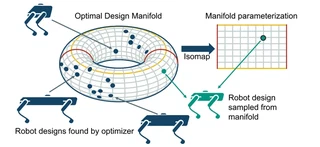
This paper introduces the optimal design manifold as a novel approach for understanding and optimizing the design of robotic systems. Existing optimization frameworks often jointly optimize design and behavior but lack insight into why specific designs are optimal for given tasks. Additionally, a functionally optimal design may not always be the most practical to build and practicality cannot always be captured by an objective function. By defining and learning the optimal design manifold, which represents the space of all optimal solutions, we provide a systematic method for exploring the design space and selecting the most practical optimal design. We apply the optimal design manifold to robot cell layout optimization, robot design optimization, and multi-camera placement and demonstrate its effectiveness in enhancing design choices by enabling a deeper understanding of what makes a design optimal.
Type
Publication
In 2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 8108-8113

Authors
Head of Research Industrial Robotics & Scientific Coordinator of CRC 1574
Hi I am Jan! I am a researcher working at the intersection of robotics and manufacturing. My work focuses on intelligent robotic manufacturing systems, where reconfigurable hardware and autonomous reasoning systems meet to enable autonomous and circular production. I also coordinate the Industrial Robotics research at wbk Institute of Production Science, KIT, as well as the Collaborative Research Centre 1574 Circular Factory for the Perpetual Innovative Product.