TriP: A Python package for the kinematic modeling of serial-parallel hybrid robots
Abstract
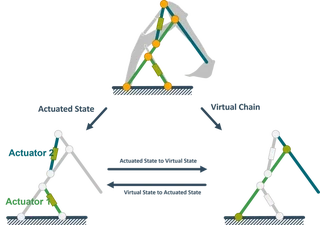
Robots can be classified according to their mechanical structure. Serial mechanisms like robotic arms are mechanisms where each moving part (called a link) is connected to only the one before and the one after it. They are often used when a large workspace is required, meaning the robot needs a long reach. In parallel mechanisms, the links of the robot form loops causing them to be structurally stronger and stiffer.
Type
Publication
Journal of Open Source Software, 7(71), 3967

Authors
Head of Research Industrial Robotics & Scientific Coordinator of CRC 1574
Hi I am Jan! I am a researcher working at the intersection of robotics and manufacturing. My work focuses on intelligent robotic manufacturing systems, where reconfigurable hardware and autonomous reasoning systems meet to enable autonomous and circular production. I also coordinate the Industrial Robotics research at wbk Institute of Production Science, KIT, as well as the Collaborative Research Centre 1574 Circular Factory for the Perpetual Innovative Product.